PID CONTROL مدل DR21 برند SIEMENS
اینسترو کنترل | تامین و فروش انواع کنترلر DR21 از برند SIEMENS آلمان با قیمت رقابتی و بهترین زمان تحویل
PID کنترل چیست:
(proportional–integral–derivative controller)از رایجترین نمونههای الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC، کنترل فشار، کنترل دما و… کاربرد دارد. کنترلکننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل فرایند است.
PID کنترل چگونه کار میکند:
کنترل کننده PID به طور جهانی پذیرفته شده است و معمولاً در کاربرد های صنعتی از کنترلر استفاده می شود زیرا کنترل کننده PID ساده است و پایداری خوب و پاسخ سریع را فراهم می کند. PID مخفف تناسبی، انتگرال، مشتق است. در هر کاربرد، ضریب این سه عمل متفاوت است تا پاسخ و کنترل بهینه به دست آید. ورودی کنترل کننده سیگنال خطاست و خروجی به دستگاه یا فرایند داده می شود. تلاش بر این است که سیگنال خروجی کنترل کننده به گونه ای تولید شود که خروجی دستگاه به مقدار دلخواه برسد.
کنترل کننده PID یک سیستم حلقه بسته است که دارای سیستم کنترل فیدبک است و متغیر فرایند (متغیر فیدبک) را با نقطه تنظیم مقایسه می کند و یک سیگنال خطا تولید می کند و بر اساس آن خروجی سیستم را تنظیم می کند. این فرآیند تا زمانی ادامه می یابد که این خطا به صفر برسد یا مقدار متغیر فرایند برابر با نقطه تنظیم شود.
تفاوت کنترلر PID با کنترلر ON/OFF:
کنترل کننده PID نسبت به کنترلر ON / OFF نتیجه بهتری می دهد. در کنترلر ON / OFF، فقط دو حالت (روشن یا خاموش) برای کنترل سیستم در دسترس است. وقتی مقدار فرآیند کمتر از نقطه تنظیم باشد روشن می شود و وقتی مقدار فرآیند از نقطه تنظیم بیشتر باشد خاموش می شود. در این کنترل کننده، خروجی هرگز پایدار نخواهد بود، همیشه در اطراف نقطه تنظیم نوسان می کند. اما کنترل کننده PID در مقایسه با کنترلر ON / OFF پایدارتر و دقیق تر است
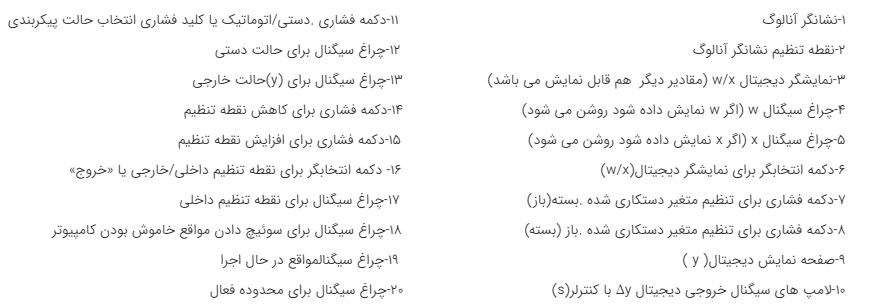
مشخصات کنترلر DR21:

اینسترو کنترل | تامین و فروش تجهیزات ابزار دقیق درایران